Yanjie Zhang

Master Student of Urban Mobility Institute, Tongji University
Yanjie Zhang 
📰 Here is my New Personal Website. This website has been suspended on August 18, 2024.
👨🎓 Background
I am currently in the third year year at Tongji University, pursuing a Master of Science in Urban Mobility within the Urban Mobility Institute of the College of Transportation Engineering. [Sep,2021-Sep,2024]
Before my journey at TJU, I laid my academic foundations at the College of Engineering of Nanjing Agriculture University, where I obtained my Bachelor’s degree of Engineering in Transportation. During my years there, I had the privilege of exploring the Route Planning Problems using deeplearning algorithms, which contributed to my bachelor’s thesis and earned a nomination for Best Thesis. [Sep,2017-Jul,2021]
At TJU, the Urban Mobility Institute is an interdisciplinary institute. With my background in Transportation, and under the guidance of several professors from the College of Surveying and Geo-informatics at Tongji University and the School of Resource and Environmental Sciences at Wuhan University, I was responsible for tackling and completing key research components of a critical R&D project. This experience led me to shift my focus to the field of high-definition maps, focusing on HD map modeling, dynamic information organization and management, and information interaction.
💡Research Interest
My research enthusiasm lies in applying AI to grounded tasks. My primary goal is to develop methods for efficiently extracting key information from crowdsourced big data to serve urban science. To achieve this goal, I identified three main challenges:
Challenge 1 Multi-element Extraction
How can valuable information be effectively extracted from crowdsourced SVI to enhance the detection and classification of road features for autonomous vehicles.
Challenge 2 Multi-element Integration
What machine learning models and data fusion techniques can be developed to integrate diverse data sources, such as SVI and vehicle sensor data, for real-time updates.
Challenge 3 Multi-element Management
How can the proposed methods for accuracy, reliability, and scalability in various driving environments.
📰 News
- 2024.9: 👏 Graduated from Tongji University and received the M.Sc. in Transportation Engineering.
🔬 Projects
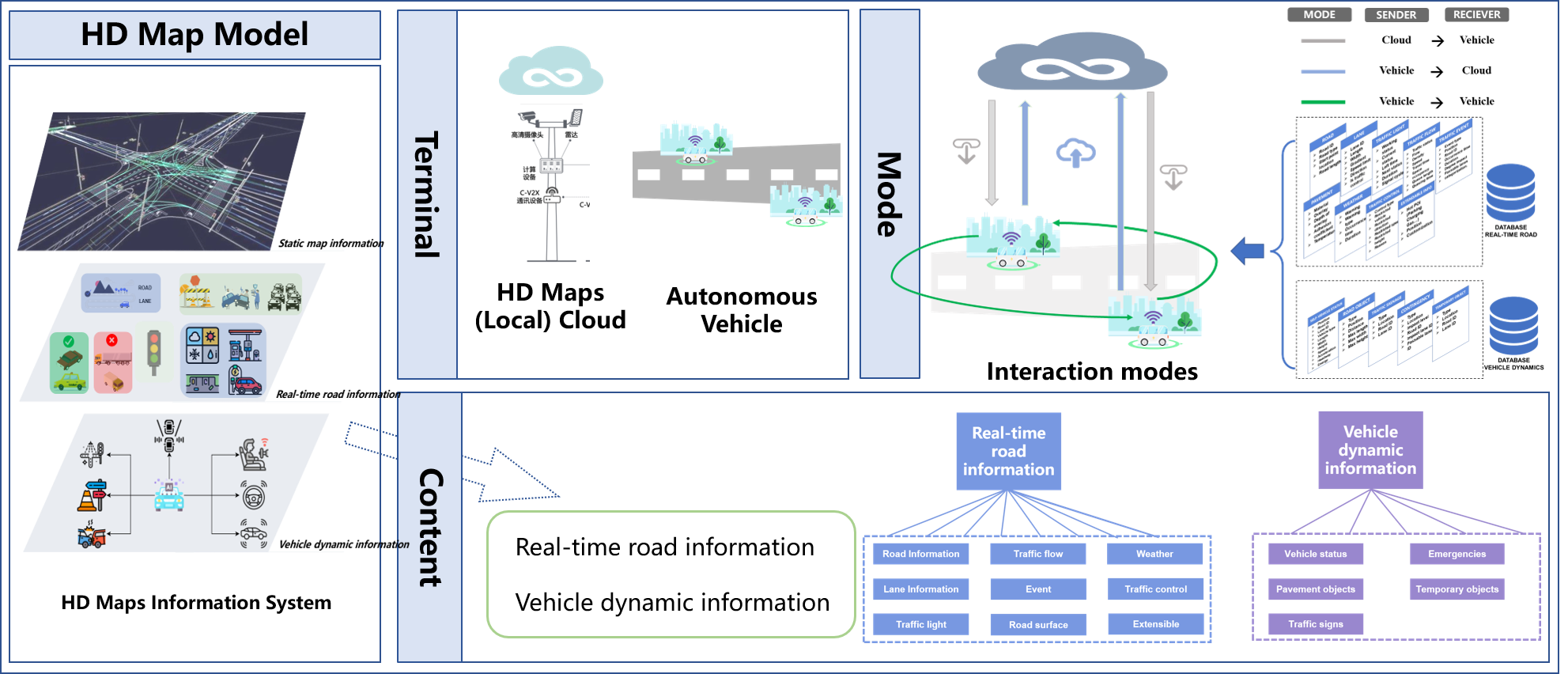
1. HD Maps Dynamic and Long-term Updating Methods and Interaction Mechanism@TJU(Nov 2021-Aug 2024)
The National Key R&D Program of China Leading by Prof. Wei Huang
In this project, we propose a High-Definition Map (HD Map) model, focusing on the dynamic information of HD map and its exchange format. We design a comprehensive content structure and data exchange format for the dynamic information of HD map and develop a Group Standard. Additionally, we propose an information interaction approach to be used between autonomous vehicles and high definition map for broadcasting and receiving dynamic information. The The phased research result has already been published in the Journal of Geomatics and Information Science of Wuhan University.
 Currently, our newest research is coming.
Currently, our newest research is coming.
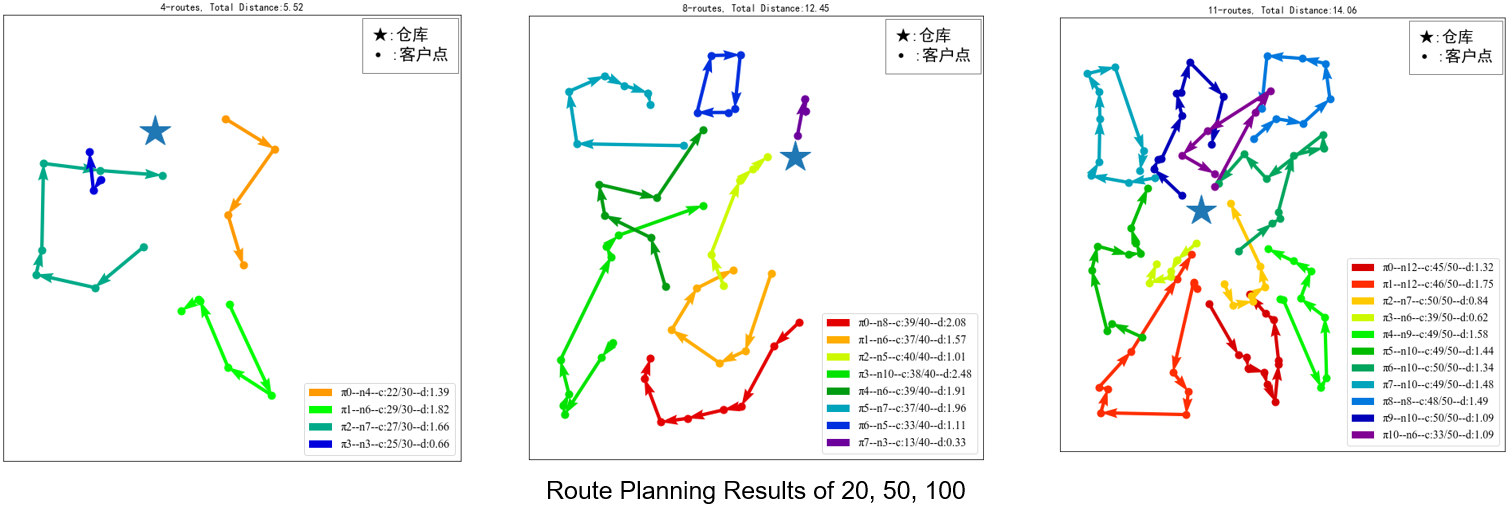
2. Solving Vehicle Routing Problems Using Deep Reinforcement Learning@NJAU(Sep 2020-May 2021)
Undergraduate Thesis Research Plan Advised by Assoc. Prof. Yang Liu
We utilized a trained deep learning model to address the Route Planning problem, specifically focusing on how to efficiently plan delivery paths for vehicles with capacity constraints. Our enhanced algorithm is applied to vehicle path planning scenarios with 20, 50, and 100 nodes, respectively. The result indicates that trucks tend to prioritize nodes that are farther from the warehouse during the middle stages of the journey. Aside from the final route, which must cover the remaining nodes, the algorithm ensures that each route maximizes the number of visited nodes.
📑 Publications
- Zhang, Y.J., Huang, W., Liu, X.T., Zhang, F.Y., Wu, H.B., Ying, S., Liu, C. (2024). An Approach for High Definition (HD) Maps Information Interaction for Autonomous Driving. Geomatics and Information Science of Wuhan University. 49(4): 662-671.
- Liu, C., Huang, W., Zhang, Y.J., et al. (2024). Dynamic Data Interaction Patterns and Contents of High Definition Maps for Autonomous Driving. Chinese Society for Geodesy Photogrammetry and Cartography.
- Zhang, Y.J., Huang, W. (2023). An Approach of High Definition Map Information Interaction. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci., XLVIII-1/W2-2023, 861–866.
🗣️ Oral Presentations
- A Brief Introduction to High Definition Map - 2nd Tongji & Hannover Seminar, 10 May, 2023.
- An Oral Presentation on ISPRS Geospatial Week 2023 - Mobile Mapping Technologies4: Mobile Mapping Technologies and HD Maps, 4 September, 2023.

👨🏫 Services
- Teaching Assistant - Advanced Research and Practice Course (Undergraduate Course), Fall 2023.